X 0 1 2 3 4 5 6 7 8

Section Three
F and G Forces
11. Relativity vs CM
X 0 1 2 3 4 5 6 7 8 |
|
Section Three |
| F and G Forces |
| ___ |
| 11. Relativity vs CM |
| 12. Kepler's 2nd |
| 13. Complex Plane |
| 14. Szebehely Eqn. |
| 15. Transitioning |
| 16. Shock Wave |
| 17. Quaternions |
| 18. Envelope Curve |
TAB 12 KEPLER'S 2nd FLAW
KEPLER'S 2nd FLAWIt is significant that, in developing the Universal Law of Gravitation (which leads directly to the Two Body Equation), Isaac Newton did not use the calculus. The Law of Gravity was derived exclusively from analytic geometry. He also used geometry to prove Kepler’s 2nd Law, that a line from the central body to a satellite in orbit sweeps out equal areas in equal times. The analytic basis of this derivation begins with the common equation
(1)
= "areal velocity"
This function (using essentially
) is not valid for ellipses, but for circles. Hence, Newton’s derivation is not valid for elliptical motion. This is not hard to see from the geometry.
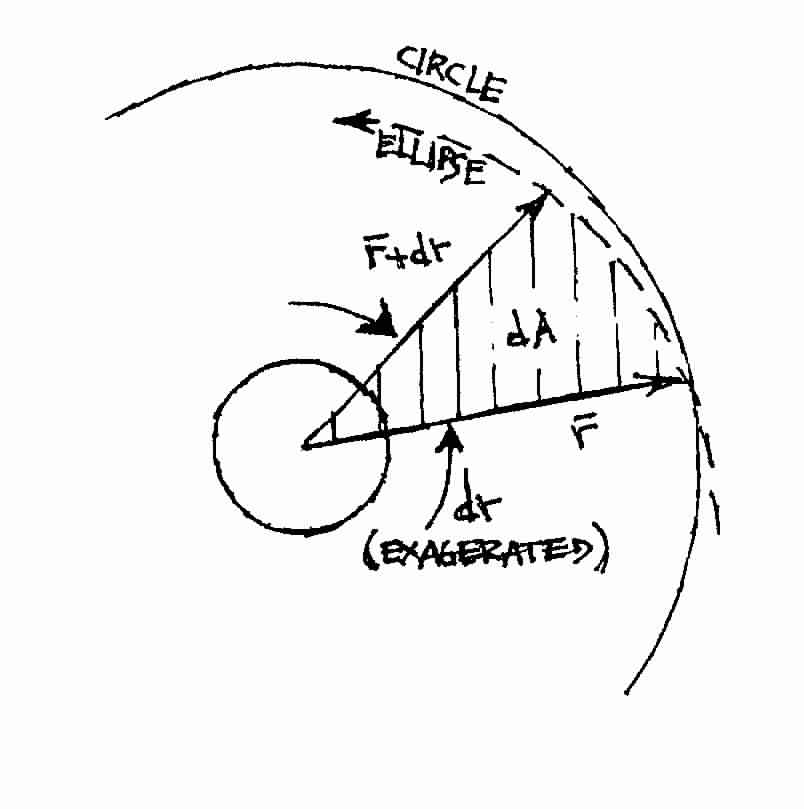
The Law of Equal Areas
Newton’s proof looks at the two vectors in the limit as time goes to zero, at which point the length of the vectors is equal and the equation holds. However, if the two vectors are equal, the orbital path is a circle. Thus, this analytical proof is good only for circular orbits. Which leaves the physical evidence, that Kepler's second law is valid (e.g. via actual observation of the planets). This discrepancy is not evident in any applications of this analytical proof, so there must be some aspect of the law itself that makes it work. The only possible explanation is that other, quite subtle, forces exist that make this law work in most situations. In extreme cases, discrepancies are attributed to Relativistic affects, but they are too nonspecific or generalized to apply to this situation. A more precise function is called for, and one that is much more intimately linked, specifically to orbital motion. Fortunately such a function already exists in the theory of orbits and it is also closely associated with elliptical orbits and the Two Body Problem (2BP).
An important equation in orbital theory is called the Two Body Equation.
(2) ![]()
which describes the acceleration (or force, from ![]() ) of a small body orbiting a much larger body, e.g. a satellite orbiting Earth. This force is inversely proportional to the square of the distance r from the central body and it acts along the direction of the vector for r. The two other functions satisfy equation (2) and they are called the f and g functions.
) of a small body orbiting a much larger body, e.g. a satellite orbiting Earth. This force is inversely proportional to the square of the distance r from the central body and it acts along the direction of the vector for r. The two other functions satisfy equation (2) and they are called the f and g functions.
(3a) ![]()
(3b) ![]()
These functions are used to propagate an orbit from an initial time t(0) to some later time.
(4a) ![]()
(4b) ![]()
A series representation in time can be made of the f and g functions, and it is used in initial orbit determination to calculate the orbital elements of a satellite just placed in orbit from three ranges determined to the satellite from ground radar stations. This method finds a new orbit plane for the observed data so that the orbital motion is according to the 2BP model. Thus the f- and g-equations are the transformation from one reference plane to another.
Now these f- and g-functions (equations 4a and 4b) are considered by the orbital mechanics community to be a mathematical curiosity, being able to propagate an orbit through time while also solving the Two Body Equation. It is helpful to pose this situation in the language of differential equations. Consider the Two Body Equation to be a special case of the general Ordinary Differential Equation
(5) ![]()
which can be linearized by making the substitutions
(6a) ![]()
![]()
(6b) ![]()
and this set of equations has two Linearly Independent (LI) solutions y1 and y2 such that the Wronskian has a nonzero determinant
(7) ![]()
The f and g functions are two such LI solutions, which in fact have a Wronskian identically equal to 1.
(8) 
Notice that the following applies to equation 8 at apoapse and periapse.
(9) 
It is interesting to notice that the two sets of eigenvector/eigenvalue pairs are quaternions. Furthermore, linear algebra says that a matrix of two LI vectors can be factored into an upper and lower triangular matrix - which implies there are two distinct mechanisms at work in the f/g factor translation of coordinates. This is consistent with the implications of previous sections, alleging an underlying system orchestrating the transformation between the symmetric and invariant planes.
Subsequent papers will show a physical basis for two new forces related to gravity. They do not act along a line as gravity does, but instead organize many bodies into a consistent reference frame. They are too subtle to be noticed in most situations, but are clearly evident when studying many bodies together. That is, in orbital mechanics, they are virtually invisible since analyses are already in a nearly exact inertial reference frame. It's only in a context of many massive bodies such as our Solar System, that these "f and g forces" can be seen.
It is easy to see that Newton's derivation of the Law of Equal Areas must have the sort of "relativistic" distortion at the origin evident with the system wave in order for the analysis to work for elliptical orbits. Hence, an indirect validation of the system wave concept.
Analysis
The f- and g-functions make the coordinate transformation as a matrix rotation - that is proven already. To do so the functions define a "symmetric plane" and does a pure rotation there. Here the invariant plane, in a Two Body Problem (2BP), is just the orbital plane. So these f- and g-functions define the relationship between the two planes in the 2BP as well as in the solar system, or 10BP. They are the equivalent of Relativity, but exist in all dimensions, not just in high gravity or high speed environments. It is significant that the 2BP is solved by the f- and g-equations in all dimensions ~ down to the Bohr Atom.
Presumably these equations define motion "in between" the orthogonal symmetric and invariant planes - which may mean when either plane is absent (analytically) or one is greatly predominant. They are kind of like a universal joint or ball bearing, except they are between planes and spaces and involve abstract math. They allow time to be invariant. The following study shows that the f-and g-functions behave exactly like the intercept of the symmetric plane at the origin.
Begin with a heuristic look at Kepler's 2nd Law derivation.
![]() =constant
=constant
thus ![]() iff
iff ![]() = constant =
= constant = ![]()
The conservation of areal velocity is not limited to an inverse squared law force (e.g. planetary motion) but is the general result for all central force motion, which includes 1/r forces.
The slight error in the mathematics that is picked up by Relativistic calculations also implies that ![]() is not constant in direction. Thus the plane of t he orbit has a slight wobble, just the kind of motion implied in the small eccentricity theory and exhibited at the origin of the symmetric plane. Before showing this mathematically, the electrical analog to the 2D harmonic oscillator can help to show how these new f- and g-forces interplay with the well known force of gravity. As shown in the theory of orbital mechanics in the study of motion near a planet, the f- and g-forces are all but nonexistent because, like a Whetstone Bridge, they balance the system so that it behaves just like a local inertial reference system; or at least independent enough so that fractal theory exists, but uniquely.
is not constant in direction. Thus the plane of t he orbit has a slight wobble, just the kind of motion implied in the small eccentricity theory and exhibited at the origin of the symmetric plane. Before showing this mathematically, the electrical analog to the 2D harmonic oscillator can help to show how these new f- and g-forces interplay with the well known force of gravity. As shown in the theory of orbital mechanics in the study of motion near a planet, the f- and g-forces are all but nonexistent because, like a Whetstone Bridge, they balance the system so that it behaves just like a local inertial reference system; or at least independent enough so that fractal theory exists, but uniquely.
Electronic Analog of the Symmetric vs. Invariant Planes
It is interesting to note that, in fact, the force we know as gravity is actually quite small compared to the f- and g-forces, as suggested by the above illustration of a Whetstone Bridge balancing circuit.
Now consider the mathematics of this situation, by reproducing the derivation for the f- and g-equations of celestial mechanics, but instead of the generalized case for any value of eccentricity or orbital shape; consider them for e=.01 and p=1.
![]()
![]()
![]()
where the last term is ![]() and can be neglected. The middle term cancels with a term developed later, both being something like
and can be neglected. The middle term cancels with a term developed later, both being something like ![]() which are small and opposite in sign and
which are small and opposite in sign and ![]()
It was shown above that ![]() , so now calculate the second function and then compare the two sides.
, so now calculate the second function and then compare the two sides.
![]()
![]()
![]()
![]()
Thus,
![]()
![]() where
where ![]() and
and ![]() (small)
(small)
and substituting ![]() (higher order terms) you get
(higher order terms) you get
![]()
Given the ![]() and
and ![]() terms and their sum = 1 for all theta, then
terms and their sum = 1 for all theta, then
![]() for all theta, then the
for all theta, then the ![]() for all theta.
for all theta.
Now to show the action of one set of terms, and the other set of terms must do the exact opposite, in order for the determinant to equal zero under all conditions. Neglecting the cos term and the ![]() last term, consider the other term
last term, consider the other term
![]() recall
recall ![]()
![]()
![]()
which works out to be an elongated sine wave (see graph below), just the motion that happens for the y-intercept of the symmetric plane at barycenter.

![]() Remainder Term
Remainder Term
This graph ignores the second term, assuming the coordinates are rotated to make the initial angle zero. The ![]() remainder term must be the exact opposite of this function so that the two terms sum to zero. One way to achieve this in 3D space is how the origin of the symmetric plane works so that near the origin there is a slight distortion but outside of a small neighborhood of the origin the symmetric plane is indistinguishable from any other flat plane in space.
remainder term must be the exact opposite of this function so that the two terms sum to zero. One way to achieve this in 3D space is how the origin of the symmetric plane works so that near the origin there is a slight distortion but outside of a small neighborhood of the origin the symmetric plane is indistinguishable from any other flat plane in space.